Laste ned presentasjonen
Presentasjon lastes. Vennligst vent

1
Forelesning for 3. semester på fysioterapeututdanningen HiO
Motorisk Kontroll Anne Riiser Svensen Forelesning for 3. semester på fysioterapeututdanningen HiO Som nevnt i den foregående forelesning har vi i år arbeidet med å legge til rette for en integrert forståelse av de problemstillinger som reises i henholdsvis modul 1 og 2. Forelesning om motorisk kontroll har dere hatt før, Hanne holdt en forelesning for dere med samme overskrift for ca et halvt år siden. I mellomtiden har dere skrevet fagnotat, hvor mange av dere valgte å skrive om utvikling ut fra et modningsbasert syn og et dynamisk systembasert syn og dere har bestått mappeeksamen noe som innebærer at dere har satt dere inn i ulike teorier om motorisk utvikling, læring og kontroll. Dere vil derfor ha et annet ståsted i dag enn dere hadde da, og andre forutsetninger for å sette fenomenet inn i egen forståelse. Jeg vil i denne forelesningen forutsette av disse teoriene er noenlunde velkjente og heller forsøke å synliggjøre hvilken betydning vår teoretiske forståelse har i møtet med pasientene, hvordan våre handlinger og tiltak styres av en underliggende teoretisk forankring. Kort sagt, bevisstgjøre oss hvilke teorier vi legger til grunn for våre tiltak.

2
Hva er motorisk kontroll?

3
Hvorfor interessere seg for motorisk kontroll?

4
En definisjon på motorisk kontroll
”the nature and cause of movement” - opprinnelsen og årsaken til bevegelse, med fokus på forståelse av bevegelse som allerede er oppnådd (Shumway-Cook & Wollacott)
")
5
Min egen private definisjon
Å ha motorisk kontroll er å ha kontroll over egne bevegelser og funksjon, slik at vi er i stand til å fungere her på jorden under de forutsetninger det innebærer. Tyngdekraft og inerti blir viktige stikkord.

6
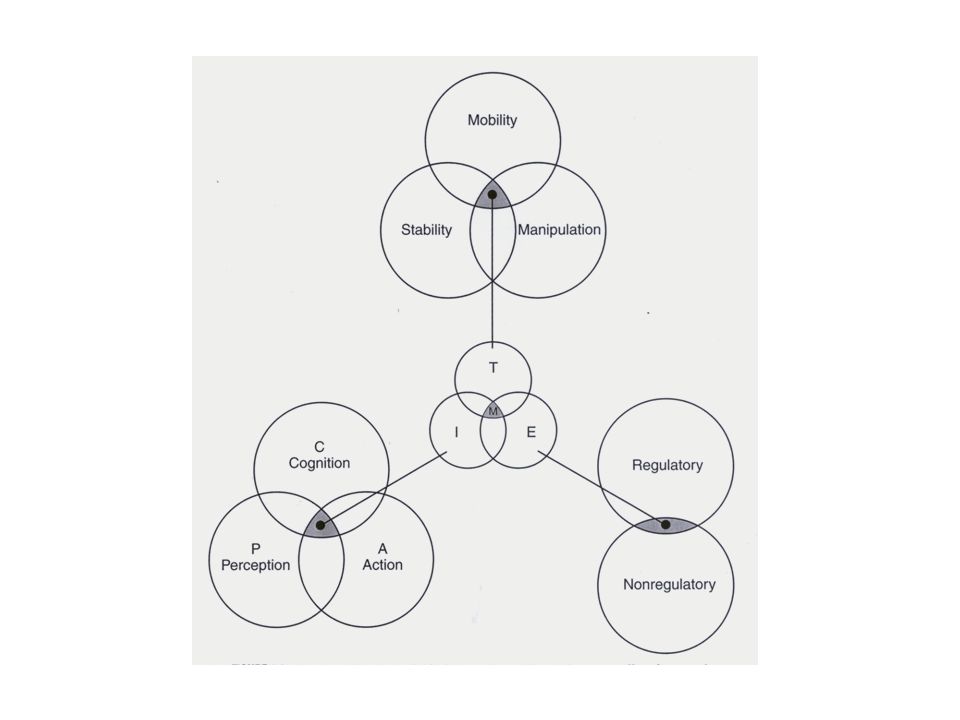
Interaksjon mellom individ, oppgave og omgivelser.
Bevegelse beskrives ofte i en kontekst der en utfører en bestemt handling. Derfor studeres motorisk kontroll ofte i forhold til spesifikke handlinger eller aktiviteter

8
Individ handling persepsjon kognisjon å gi mening til det som sanses
intensjon oppmerksomhet motivasjon følelsesmessige aspekter

9
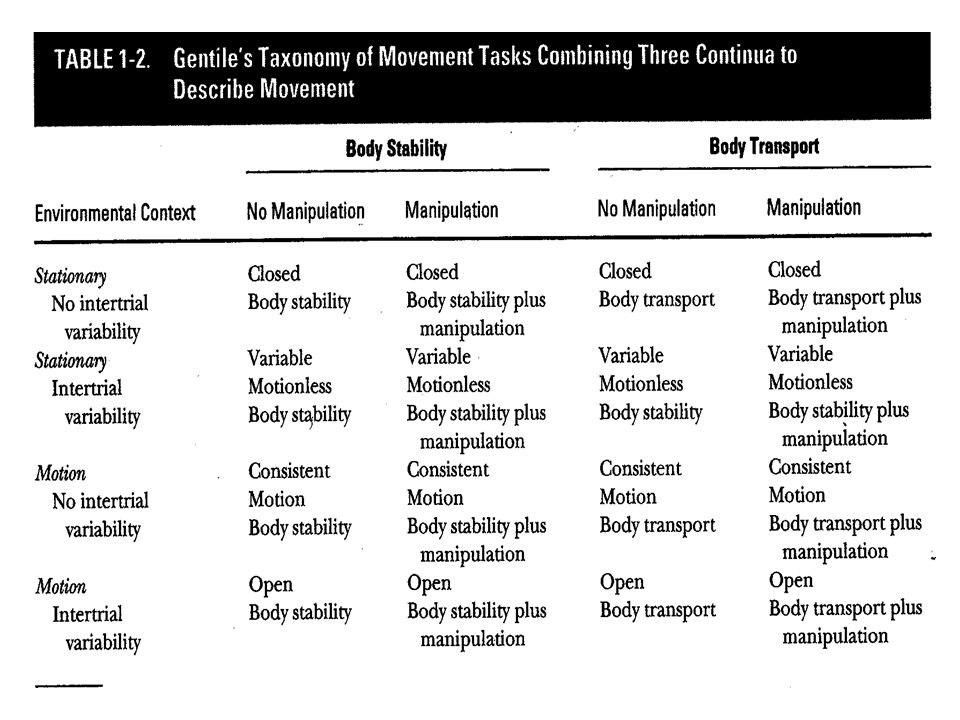
Oppgave mobilitet stabilitet manipulasjon
atskilte versus kontinuerlige oppgaver manipulasjons kontinuum oppmerksomhets kontinuum åpne versus lukkede oppgaver.

10
Omgivelser regulerende (regulatory)
ikke-regulerende (non - regulatory)
")
12
Bakgrunnen for teorier innen motorisk kontroll

13
Ulike teorier Refleksteorien Hierarkisk modell Motorisk programteori
Systemteorier

14
Refleksteorien Bygger på stimulus/respons-teori

15
Hierarkisk modell motorisk kontroll som hierarkisk organisert
høyere nivåer av hjernen styrer over lavere nivåer skader på CNS svarende til de forskjellige nivåer kan avleses i evnen til motorisk kontroll.

16
Kommentarer i forhold til fysioterapi
Refleksmodellen: arbeid med enkeltmuskler og/eller avgrensede bevegelser Hierarkisk: vekt på bevegelsesmønstre Eksempler: Bobath, PNF, Bruunstrøm

17
Kroppssyn Dualistisk kroppssyn: skiller mellom kropp/sjel
ser kroppen som en fysisk størrelse opplevelser, mening, motivasjon, hensikt, betydning, mellommenneskelige relasjoner og kontekst er uten betydning i en slik forståelse

18
Motorisk programteori
et sentralt motorisk mønster som eksisterer uavhengig av sensoriske input kan aktiveres enten av sensorisk stimuli eller via sentrale prosesser

19
Ulike betydninger av termen ”motorisk mønster/program”
sentral mønster generator, det vil si en spesifikk nevral enhet lik den som genererer gange hos en katt. I dette tilfelle representerer termen nevrale forbindelser som er stereotype og "hardwired” kan også brukes til å beskrive de motoriske programmer på høyere nivå som representerer handlinger i mer abstrakte termer

20
Systemteorier dynamisk handlingsteori
dynamisk system modell oppgaveorientert teori (Peter Greene) økologisk teori (James Gibson)
 økologisk teori (James Gibson)")
21
Dynamisk handlingsteori
selvorganiserende subsystemer ikke hierarkiske sirkulære ikke-lineære egenskaper minus sentrale kommandoer fra CNS

22
Dynamisk system modell
Bernstein: kroppen som et mekanisk system fysiske forklaringer på bevegelsers karakteristika underkastet ytre krefter og indre krefter frihetsgrader synergier

23
Dynamisk system modell forts.
Thelen og Smith: vektlegging av konteksten kontekst binder sammen det overordnede og det lokale, individuelle

24
Økologisk teori James Gibson:
interaksjon mellom vårt motoriske system og våre omgivelser for best mulig måloppnåelse flytter fokus fra reaksjon på omgivelsenes variabler (sensomotorisk) til et system som aktivt utforsker omgivelsene for å nå sine mål (persepsjons-motorisk)
 til et system som aktivt utforsker omgivelsene for å nå sine mål (persepsjons-motorisk)")
25
Konsekvenser for fysioterapi
hjelpe pasienten til å utforske de muligheter som kan hjelpe ham/henne til bedre funksjon og dermed nå sine mål - innen for de forutsetninger vedkommende har og de begrensninger vedkommendes sykdom eller skade utgjør.

26
Oppgaveorientert tilnærming
P. Greene, J. Gordon: ser normal bevegelse som en interaksjon mellom mange systemer ser bevegelse som organisert rundt en målorientert oppgave bevegelsen påvirkes av omgivelsene vektlegger oppgaven som skal løses fremfor at involverte bevegelser trenes isolert

27
Konsekvenser for fysioterapi
Motor relearning program MRP vesentlig å arbeide med klare, identifiserbare funksjonsmål fremfor å innøve bevegelser for bevegelsenes egen skyld forandringer i omgivelsene og tilpasning til disse blir en kritisk del av det å gjenvinne tapt funksjon

28
Litteratur Beckung, E et al (2002). Sjukgymnastik fôr barn och unge
Schriver, NB (2003). Fysioterapi og læring Shumway-Cook, A & Woolacott, MH (2001). Motor Controll Tetzschner, SV (2001). Utviklingspsykologi
. Fysioterapi og læring. Shumway-Cook, A & Woolacott, MH (2001). Motor Controll. Tetzschner, SV (2001). Utviklingspsykologi.")
Liknende presentasjoner