Laste ned presentasjonen
Presentasjon lastes. Vennligst vent

1
Vibrations and second order systems
Material from Section 3.14: Dynamic Models (Fraden) Section 8: Velocity and accelleration (Fraden) Paynter: Chapter 15
 Section 8: Velocity and accelleration (Fraden) Paynter: Chapter 15.")
2
Position – velocity - acceleration
Oscillatory motion Position Velocity Acceleration Consequence 1: low frequency -> measure position or velocity high frequency -> measure acceleration

3
Consequence 2 Plotting position amplitude emphasizes low frequencies
Plotting acceleration emphasizes high frequencies Acceleration Velocity Fig 3: Bearing damage Frequency Velocity is the usual compromise Frequency Fig 2: Misalignment

4
Acceleration -> Position
Acceleration is independent of inertial system Can be measured without reference Can be measured in a closed container Position can be found by integrating twice:

5
BUT => Measure position if you can Or, get a grip on your errors

6
For et svingesystem (andre ordens system) trenger vi
To steder å lagre energi Kondensator (elektrostatisk energi) og spole (magnetisk energi) Masse i bevegelse (kinetisk energi) og fjær (potensiell energi) I tillegg har vi vanligvis et sted der energien blir gjort om til varme Motstand Demper
 og spole (magnetisk energi) Masse i bevegelse (kinetisk energi) og fjær (potensiell energi) I tillegg har vi vanligvis et sted der energien blir gjort om til varme. Motstand. Demper.")
7
For å analysere et (svinge) system trenger vi
Signalgiver som gir et pådrag med bestemt fase frekvens amplitude Analysator som kan finne fase frekvens amplitude Av utgangssignalet Paynter

8
Da kan vi måle transferfunksjonen
Vinkelfrekvens og frekvens f brukes om hverandre, ofte brukes i teori og f i praksis. Husk at =2πf

9
Transferfunksjon og impedans
I mekanikk er Transferfunksjonen forholdet mellom posisjon og kraft Impedans forholdet mellom hastighet og kraft I elektronikk er Transferfunksjonen forholdet mellom inngang og utgang Impedans forholdet mellom spenningen over kretsen og strømmen gjennom den Fraden bruker transferfunksjon om den statiske karakteristikken til en sensor

10
For å beskrive et svingesystem trenger vi
Sammenheng mellom koordinatene Bevegelseslikninger Initialbetingelser og/eller pådrag

11
Mekanisk svingesystem
x

12
Elektrisk svingesystem

13
Bevegelseslikningen

14
Resonansfrekvens Ved null dempning går transferfunksjonen mot uendelig når: Innfører derfor udempet resonansfrekvens

15
Q-faktor

16
Amplitude og fase

17
Q-faktoren dukker opp som
Egenfrekvens delt på halvverdibredde for transferfunksjonen kvadrert (power) Antall ganger et system som ”slippes” svinger før amplituden er fallt til 1/e Vinkelfrekvens ganger lagret energi delt på effekttap per tidsenhet Forholdet mellom DC respons og maks respons
 Antall ganger et system som slippes svinger før amplituden er fallt til 1/e. Vinkelfrekvens ganger lagret energi delt på effekttap per tidsenhet. Forholdet mellom DC respons og maks respons.")
18
Amplitude Q=1/2,1,10 Lineære akser Logaritmiske akser
Kritisk dempning (se kompendiet):
:")
19
Resonans og fase Arbeid utført av kraften på svingesystemet
Hvis kraft og posisjon er i fase: Hvis posisjonen henger 90 grader etter kraften:

20
Frekvens regimer Resonans Statisk: Fjær dominert Dynamisk:
Kondensator dominert Dynamisk: Masse dominert Spole dominert

21
Blokkfunksjonsbeskrivelse
Tegner alltid integrasjon Med antagelsen får vi Derfor skriver vi ofte

22
Blokkfunksjon for svingesystem

23
Transferfunksjonen (som før)
")
24
Examples

25
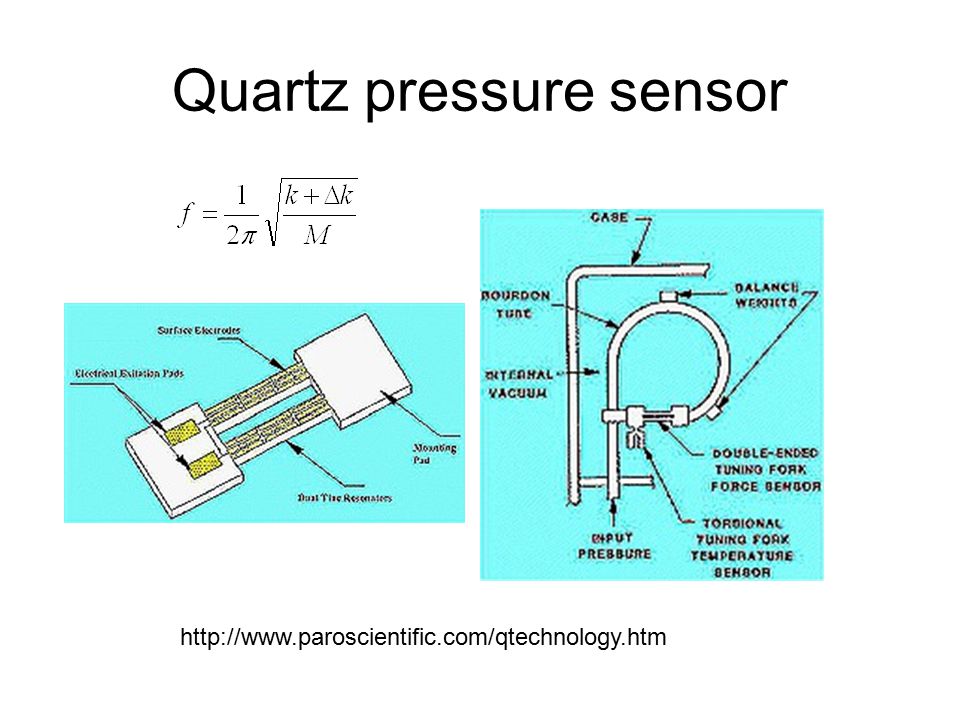
Quartz pressure sensor
26
Quartz microbalance ΔM M

27
Analogies Magnetic en Kinetic energy Electrostatic en Potential energy
ΔT=RQ Force control Voltage control Current control

Liknende presentasjoner


















 Kjemisk (batteri)>")
>")