Laste ned presentasjonen
Presentasjon lastes. Vennligst vent

1
Høgskolen i Agder Grimstad ENE 202 – våren 2006
Systemstabilitet Høgskolen i Agder Grimstad ENE 202 – våren 2006

2
Generatoren Når en trefase kortslutning oppstår vil generatorens Pelekt bli drastisk redusert siden den mater inn i en i hovedsak induktiv krets Effekten Pmek som produseres av turbinen vil imidlertid ikke endres i den korte perioden feilen pågår Turbinregulatoren setter igang med å øke hastigheten på rotoren for å lagre overskudds energien Rotorvinkelen vil øke inntil generatoren mister synkronismen Det viser hvor viktig det er at releer og brytere får koblet bort feilen så raskt som mulig

3
Bevegelseslikninger for generator
d²δ M + ΔP = 0 dt² Hvor M = G H / 180 f – rotorens vinkelmoment Hvor G er MVA ratingen for maskinen, og H er treghetskonstanten for maskinen, og f er frekvensen

4
Dette betyr at: Dersom uttaket av elektrisk kraft fra generator minker, vil polhjulsvinkelen øke Det kommer av at den mekanske energien som turbinen gir til generatoren holder seg konstant Overskuddseffekten (Pmech – Pelect) brukes til å aksellere rotoren
 brukes til å aksellere rotoren.")
5
Systemets likninger Systemet består av sammenkoblede elektromekaniske elementer Kan representeres med differensiallikninger Ved store forstyrrelser er likningene ulineære Ved små forstyrrelser kan likningene med små avvik antas lineære

6
Løsning δ = k1 ea1t + k2 ea2t + ... + kn eant
Løsningen av differensiallikningene er på formen: K1, k2, ... , kn er integrasjonskonstanter og a1, a2, ..., an er røttene i den karakteristiske løsningen ved egenverdimetoden δ = k1 ea1t + k2 ea2t kn eant

7
Tolkning Dersom en av røttene er positive, vil vinkelen øke og ikke komme tilbake til utgangstilstanden Kriteriet for stabilitet er derfor at alle røttene i løsningen (egenverdiene) er negative Røttene kan bestemmes ved hjelp av programvare for egenverdiberegninger
 er negative. Røttene kan bestemmes ved hjelp av programvare for egenverdiberegninger.")
8
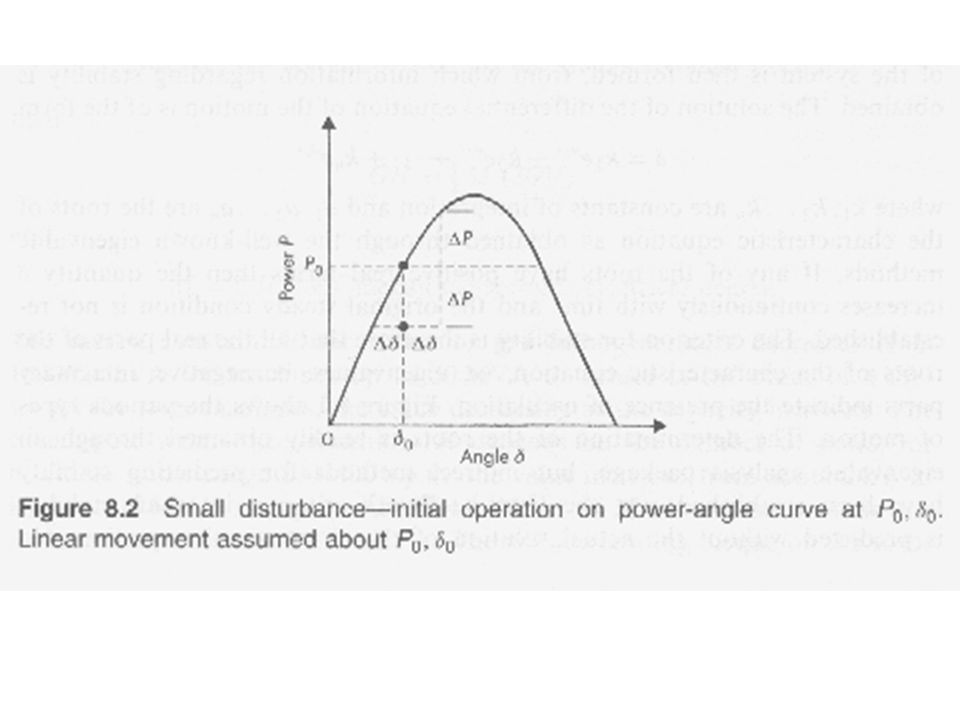
Figure 8.1

9
Estimering Egenverdiene kan beregnes med programvare
Det finnes også kriterier som kan brukes til å forutsi om et system er stabilt eller ikke, uten å foreta nøyaktige beregninger Kriteriene gir ikke svar på hvor stabilt systemet er, bare om det er stabilt eller ikke

11
Generator koblet til uendelig samleskinne
Den karakteristiske likningen blir: Hvor Kd er en konstant dempekoeffisient Hvis uttrykket i parantesen er negativt, vil systemet ikke være stabilt Svingningenes frekvens er bestemt av røttene i løsningen M s2 + Kd s + ( dP / dδ ) = 0
 = 0.")
12
Løsning uten demping

13
Effekt av spenningsregulator
Uten spenningsregulator er stabilitetsgrensen δ = 90° Med spenningsregulator vil stabilitetsgrensen kunne være over 90°

14
Eksempel 8.1 Synkrongenerator med reaktans 1.5 p.u, er tilknyttet et uendelig system med spenning 1.0 p.u gjennom en linje med reaktans 0.5 p.u Tomgangsspenningen til generatoren er 1.1 p.u og treghetskonstanten H = 5 MW –s pr MVA Resistans og demping kan neglisjeres Beregng svingningenes frekvens når generatoren drives med en lastvinkel på 60° og utsettes for en liten forstyrrelse

15
To generatorer forbundet over en reaktans
Systemet er stabilt dersom uttrykket under rottegnet er positivt Stabilitetsgrensen for små forstyrrelser er høyere enn den generelle grensen for generatorer

16
Turbinregulator Turbinregulatoren følger med på avvik i frekvensen og virker på ledeapparatet til turbinen Turbinregulatoren vil raskt merke svingningene og forsøke å jevne disse ut ved å øke og minke den mekaniske effekten Turbinregulatorer er derfor en viktig komponent for å avhjelpe stabilitetsproblem (over flere sek.)
")
17
Stabilitetsgrense Stabilitetsgrensen er den maksimale effekt som kan overføres i systemet mellom produksjon og belastning uten at systemet blir ustabilt Den dynamiske stabilitetsgrensen gjelder for små forstyrrelser som lastendringer Grensen kan finnes ved at overføringen økes i små steg inntil ustabilitet oppstår

18
Generatorer Generatorene designes slik at de kan opereres trygt innenfor de grenseverdier som leverandøren har satt Det legges vanligvis inn 20 % sikkerhets margin i den sonen der generatoren tar imot reaktiv effekt Spenningsregulatoren har også en positiv virkning på stabiliteten til generatoren

19
Generatorer Moderne generatorer drives med en lastvinkel på rundt 60°
Med en praktisk stabilitetsgrense på 90° vil det da være 30° til overføringssystemet Et punkt i systemet der lastflyten snur, kan velges som vinkelrefeanse

20
Kriterium på dynamisk stabilitet
Det enkleste kriteriet på dynamisk stabilitet er: Dvs at synkroniserings koeffisienten er positiv – og at vi befinner oss på venstre side av P/δ kurven dP / dδ > 0

21
Antakelser i beregninger
Generatoren representeres som en konstant impedans i serie med tomgangs spenningen Turbinen gir konstant mekanisk effekt Hastighetsendringer ignoreres Elektromekanisk demping i generatoren ignoreres Endringene i lastvinkelen δ er små Beregningene kompliseres dersom maskintreghet, turbinregulator, spennings regulator Kriteriet gir en konservativt resultat og lar det derfor være igjen en sikkerhetsmargin til stabilitetsgrensen

22
Beregningen I systemer med mange generatorer må man prøve seg fram med lastøkning på alle generatorene etter tur Systemet reduseres til sin enkleste form uten å ta bort noen av generator samleskinnene dP/dδ bestemmes etter tur for alle generatorene og om mulig økes overføringen ytterligere

23
Transient stabilitet og rotorvinkelen
Transient stabilitet har med store forstyrrelser å gjøre Trefase kortslutning benyttes ofte for å beregne transiente stabilitetsgrenser Siden trefase kortslutninger er sjeldne, brukes også de hyppige fase til jord feil

24
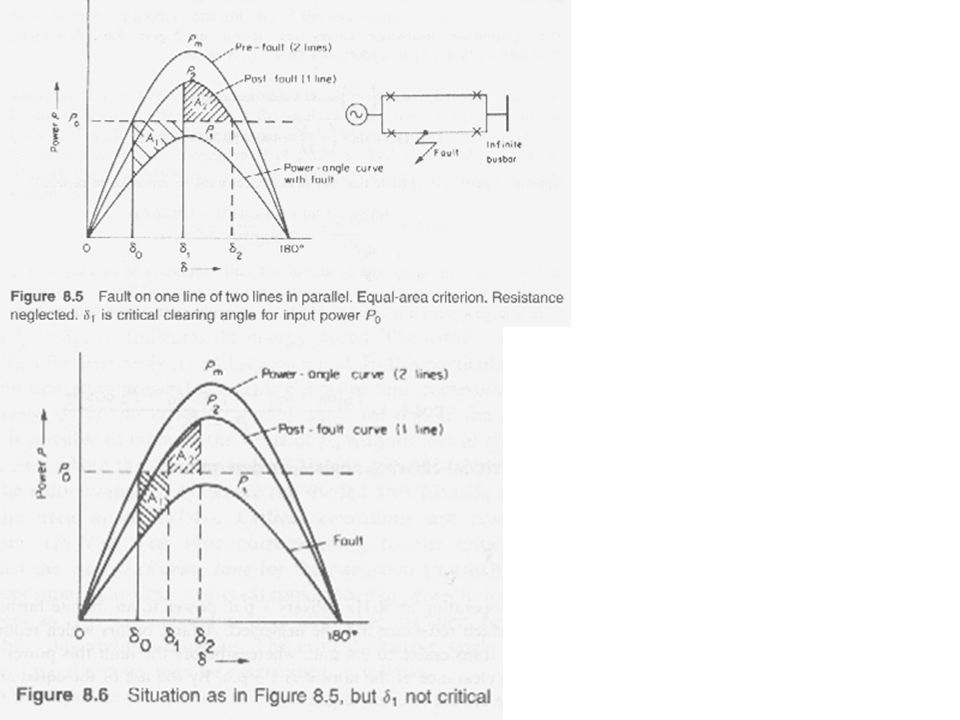
Like areal kriteriet Bygger på at rotoren må kunne gi tilbake like mye energi som den har tatt opp fra turbinen under svingeforløpet Rotoren vil svinge helt til vinkelhastigheten er null – da forblir den stabil – i motsatt fall vil den miste synkronismen Arealen på begge sider av linjen P0 må summere opp til 0

25
Maksimal produksjon vil være når arealet mellom δ0 og δ1 er lik arealet mellom δ1 og δ3

27
Begreper Maksimum overføringseffekt – den største effekt som kan overføres når det tas hensyn til transient stabilitet Kritisk bortkoblings vinkel – den δ1 som gjelder for P0 ved en viss bortkoblingstid Kritisk bortkoblingstid – den maksimale tid feilen kan stå på uten at synkronismen mistes

28
Reduksjon av store systemer
For store systemer kan alle generatorer og belastninger ekvivaleres med en generator og en motor med en impedans i mellom Fordelingen av generator og motor varierer etter hvor feilen legges i systemet

29
Transient stabilitet – og tid
Til nå har vi brukt vinkler, men tid er viktigere for innstilling av vern Bruker numeriske metoder og datamaskin for å bestemme svingekurven mhp tid Følgende antakelser gjelder: Vi stykker opp beregningen i diskrete intervaller som datamaskinen kan håndtere Den aksellererende kraften P antas konstant fra midten av et interval til midten av de neste Vinkelhastigheten er konstant over et helt interval

31
Transient stabilitet med datamaskin
Programvare kan enkelt lages for eksemplene i boka – bygger på lastflytberegninger for hver verdi av δ som viser generatorenes produksjon Virkninger av spennings- og turbinregulator kan også tas med Bruker ulike numeriske integrasjons metoder Finnes en del forskjellige programvare i markedet PSS/E, EDSA, CYME, Digsilent

32
Multi generator system
Utelukkende ved bruk av programvare Kriterier: Er vinkelverdiene innenfor normen? Hvilke områder rives løse fra andre områder? Finner vinkeltyngdepunktet (centre of inertia) i system som et referansepunkt Vanligvis er det bare noen få linje- forbindelser i et stort system der over føringen er begrenset av stabilitetsforhold
 i system som et referansepunkt. Vanligvis er det bare noen få linje- forbindelser i et stort system der over føringen er begrenset av stabilitetsforhold.")
33
Transient energi funksjoner
”Like arealer kriteriet” er en form for energi funksjon for å sjekke stabilitet

34
God stabilitet Det viktigste kriteriet for å holde god stabilitet er å drive systemet med så små lastvinkler som mulig Da vil marginene være store i forhold til stabilitetsgrensen Flere linjer i parallell og lavere impedanser i systemer er den beste måten å sikre dette på

35
Generatordesign Store og tunge generatorer er fra et stabilitetssynspunkt å foretrekke fremfor små Trenden er at større effekter genereres i lettere maskiner Ekstra svingmasse kan legges til som svinghjul festet til akselen Utbygging av småkraftverk betyr mange små generatorer med relativt enkle regulatorer i et system med relativt store impedanser Høyere generatorspenninger er bedre for stabiliteten siden effekt/vinkel kurven er proporsjonal med spenningen

36
Forbedre systemstabiliteten
Raske spenningsregulatorer Rask bortkobling av feil (80 ms mulig med SF6 brytere og raske relevern) Turbinregulatorer som leder mekanisk effekt bort og hindrer en del av aksellerasjonen av rotor (ikke hydro) Dynamisk bremsing av ved tyristorstyrte shunt resistorer over generatorklemmene Fjerning av belastning fra systemet
 Turbinregulatorer som leder mekanisk effekt bort og hindrer en del av aksellerasjonen av rotor (ikke hydro) Dynamisk bremsing av ved tyristorstyrte shunt resistorer over generatorklemmene. Fjerning av belastning fra systemet.")
37
Forbedre systemstabiliteten
Rask gjeninnkoblingsautomatikk på enkelte lange overføringslinjer Økt bruk av HVDC SVC – Static Var Compensation bidrar til å dempe svingninger Energilagring Seriekondensatorer på linjene får å redusere impedansen Dempetilsats på spenningsregulator i store kraftstasjoner, Dempetilsats på SVC

Liknende presentasjoner

















 til (x2,y2) er endringen Δx = x2-x1 og Δy = y2-y1 y2 y1 Δy Δx φ Stigningstallet m = x1 x2.>")


>")