Laste ned presentasjonen
Presentasjon lastes. Vennligst vent

1
Simulering av: teknologiske arbeidsprosesser - automasjon - roboter med LEGO Mindstorms EV3 ATEKO Introduksjon 1. september 2015

2
Mindstorms RCX (1998) – NXT (2006) – EV3 (2013) – The "Braitenberg Brick" system, designed by Fred Martin, allows children to build robots to explore the concepts in Valentino Braitenberg’s 'Vehicles.” – The Programmable Brick is a tiny, portable computer embedded inside a LEGO brick,
 – NXT (2006) – EV3 (2013) – The Braitenberg Brick system, designed by Fred Martin, allows children to build robots to explore the concepts in Valentino Braitenberg’s Vehicles. – The Programmable Brick is a tiny, portable computer embedded inside a LEGO brick,")
3
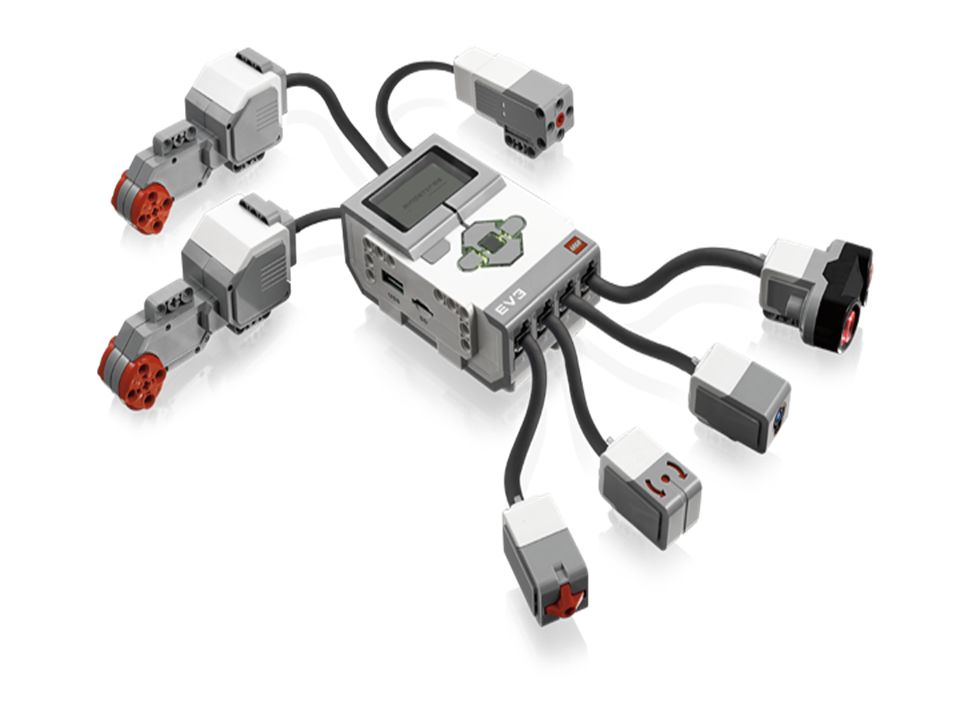
Mindstorms RCX (1998) – NXT (2006) – EV3 (2013)
 – NXT (2006) – EV3 (2013)")
5
Utviklernes mål med TPB, som forgjengeren / prototypen til LEGO Mindstorms var: Multiple Activities Multiple Input and Output Modalities (former) Multiple Processes Multiple Bricks An Active Environment Artificial Creatures Out into the World
 Multiple Processes Multiple Bricks An Active Environment Artificial Creatures Out into the World")
6
Objektorientert programmering Eksemplifisert med programmeringsverktøyet EV3 – EV3 er basert på programmeringsverktøyet LabView fra National Instruments. NXT-G er et ”karosseri” som bruker LabView som motor og drivverk. – Det er EV3 som du ser, og forholder deg til, mens det er LabView som gjør jobben. – Det vil si at en EV3lisens inneholder en LabView lisens Dette betyr at du vil kjenne deg igjen hvis du senere vil arbeide med LabView. Ikke Ikoner og utseende, men måten å arbeide på.

7
Objektorientert programmering Eksemplifisert med programmeringsverktøyet EV3 – EV3 er basert på programmeringsverktøyet LabView fra National Instruments. NXT-G er et ”karosseri” som bruker LabView som motor og drivverk. – Det er EV3 som du ser, og forholder deg til, mens det er LabView som gjør jobben. – Det vil si at en EV3lisens inneholder en LabView lisens Dette betyr at du vil kjenne deg igjen hvis du senere vil arbeide med LabView. Ikke Ikoner og utseende, men måten å arbeide på.

8
Objektorientert programmering Konsept som stammer fra Simula fra 1960 tallet. Objekter: – pakke data og funksjonalitet sammen i enheter i programmet Objekter og klasser – En klasse er innen objektorientert programmering et sett med spesifikasjoner for hvordan et objekt skal se ut. En klasse er altså ikke en representasjon av et objekt. For å lage et objekt må man opprette klassen, og man sitter da igjen med ett enkelt objekt «av den klassen».

9
Datalogging Innsamling av data Analyse av data

10
EV3 Vinkel- måler (servo-motor) Energi- “Oppsamler” (Batteri) Solcellepanel
 Energi- Oppsamler (Batteri) Solcellepanel")
11
Analyse av læringsoppgaver SNaturfag TTeknologi EEngineering AKunst / Design MMatematikk

12
Et eksempel på analyse av en læringsoppgave S – Solenergi, miljø, (redusere antall “dead trees” ) T – Ulike måter å “samle opp” energi E – Engineering Design Process A – Design (Bygge / konstruere) M – Matematikk og logikk (programmering)
 T – Ulike måter å samle opp energi E – Engineering Design Process A – Design (Bygge / konstruere) M – Matematikk og logikk (programmering)")
13
“Dead trees”

14
Math

15
Mathematics ( STEM) LEGO geometry – The height of a brick is 9,6 mm without nubs, and the distance between nubs is 8 mm. A standard ”eight” brick has following measures: Length:4 (4 x 8 = 32 mm) Wide:2 (2 x 8 = 16 mm) Height:1 (9,6 mm) Proposing: 5 – 5 – 6 (length– wide– height) Plates is 1/3 height of an brick: 3,2 mm
 Wide:2 (2 x 8 = 16 mm) Height:1 (9,6 mm) Proposing: 5 – 5 – 6 (length– wide– height) Plates is 1/3 height of an brick: 3,2 mm.")
16
Calculations Calculation of vertical distances with plates: 1 height= 9,6 mm + 2 1/3 heights (9,6 / 3)*2)= 6,4mm 9,6 + 6,4 = 16 mm Calculation of horizontal distances Distance between nubs / holes = 8 mm 2 holes is 8mm x 2 = 16 mm Without plates: 5 x 9,6 mm = 48 mm 6 x 8 mm = 48 mm This is an example of calculations for building constructions with LEGO
*2)= 6,4mm 9,6 + 6,4 = 16 mm Calculation of horizontal distances Distance between nubs / holes = 8 mm 2 holes is 8mm x 2 = 16 mm Without plates: 5 x 9,6 mm = 48 mm 6 x 8 mm = 48 mm This is an example of calculations for building constructions with LEGO")
Liknende presentasjoner









 Patterns er erfaringer Patterns er best-practices Patterns er how-to Patterns er velkjent design Larman: ” ’new Pattern’ is an Oxymoron”>")
 Patterns er erfaringer Patterns er best-practices Patterns er how-to Patterns er velkjent design Larman: ” ’new Pattern’ is an Oxymoron”>")








