Laste ned presentasjonen
Presentasjon lastes. Vennligst vent

2
Etter forarbeidet og dagen i dag er målet at dere skal kunne:
følge en tredimensjonal byggetegning og ved hjelp av denne bygge en robot programmere roboten til å gjøre på forhånd bestemte oppgaver, for eksempel stoppe når den treffer kanten på robotbanen måle og regne ut hvor langt roboten vil kjøre med f.eks. tre rotasjoner (hjulene går tre ganger rundt) forklare om omkretsen på hjulene har betydning for hvor langt roboten vil kjøre gi eksempler på flere måter vi kan bruke for å beregne omkretsen på et hjul beskrive hvilke sensorer roboten har og i korte trekk kunne forklare hvordan disse virker
 forklare om omkretsen på hjulene har betydning for hvor langt roboten vil kjøre. gi eksempler på flere måter vi kan bruke for å beregne omkretsen på et hjul. beskrive hvilke sensorer roboten har og i korte trekk kunne forklare hvordan disse virker.")
3
Hva er en robot? Hva gjør en robot? Hva gjør en robot?
Hvordan ser de ut? Hva skal til for at vi kan kalle noe en robot? Hva gjør en robot? Hvordan ser de ut? Hva skal til for at vi kan kalle noe en robot? Oppgave: - Tegn en robot slik du tror den ser ut, ut fra det du vet fra før.

4
Definisjon på en robot En robot kan motta data ved hjelp av sensorer.
En robot har en hjerne for behandling av data. En robot kan sende ut data i form av bevegelse, lys, lyd eller lignende. Med denne definisjonen har vi roboter rundt oss hele tida! Robotene kan ha programmer som gjør noe som er bestemt på forhånd. Eller de kan reagere på signaler fra sensorene, slik vi reagerer på signaler fra sansene våre. Roboten utfører en handling ut fra hvilket signal den får fra sensoren. Hva de skal gjøre bestemmer vi, gjennom å programmere dem

5
Eksempler på roboter Røykvarsler Trafikklys Automatisk døråpner

6
Den ligger i filarkivet til modulen.
Vis filmen: Connect-Saw.wmv Den ligger i filarkivet til modulen. Tips! Dersom du lagrer filmen lokalt på maskinen som skal brukes til presentasjonen kan du laste den inn i powerpointen. Nils Kr. Rossing

7
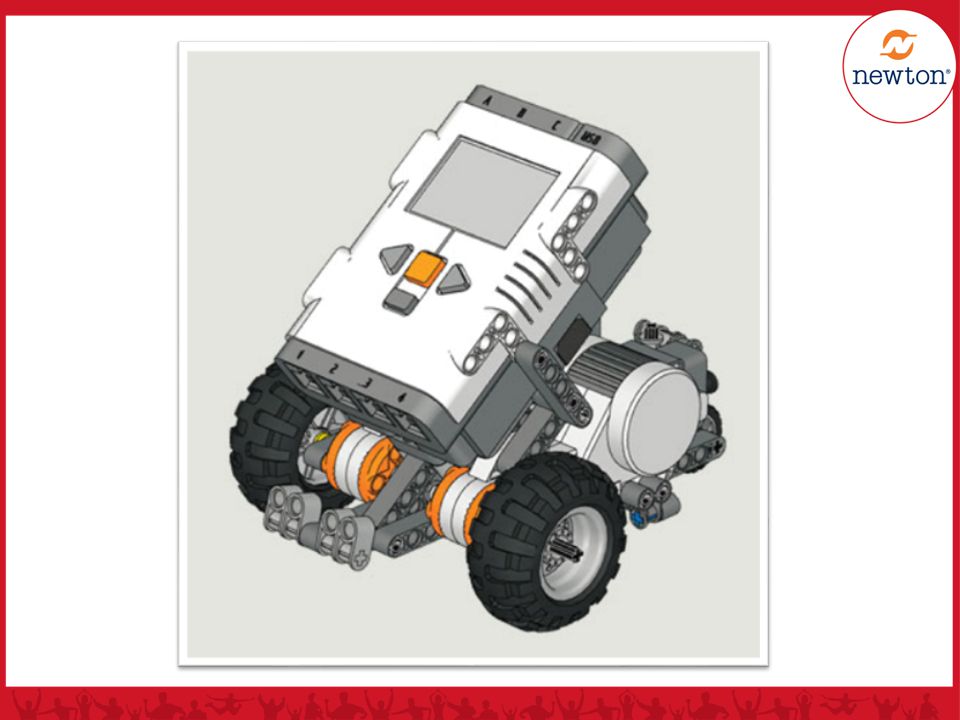
NXT med sensorer og motorer
Trykksensor Nå skal vi snakke om den roboten dere skal holde på med i dag. Den skal se slik ut når den er ferdigbygd. Viser kjørebasen. Lydsensor Ultralydsensor Lyssensor

9
Robotens hjerne NXT`en
NXT`en er hjernen til MINDSTORMS roboten. Den er en intelligent computer-kontrollert LEGO kloss som gjør MINDSTORMS roboten “levende” og kan utføre forskjellige handlinger. Orange knapp: Slå på/ Enter/ Kjør. Lyse grå knapper: For å velge venstre eller høyre i menyen. Mørk grå knapp: Tøm/ Gå tilbake/ Slå av. .

10
Robotens hjerne NXT`en Hovedenheten har:
• tre motorporter: Port A, B og C. • fire sensorporter nummerert fra 1-4. • USB-kontakt slik at du kan koble til PC´en • Høyttaler slik at du kan legge til lyder i programmet og høre disse når programmet kjører.

11
Motor med rotasjonssensor
Gir roboten din muligheten til å bevege seg. Innebygd rotasjonssensor gir presis og nøyaktig kontroll.

12
Trykksensor Trykksensor
Lar roboten føle omgivelsene rundt seg og kan også brukes som startknapp for programmene dine.

13
Lyssensor Gir roboten “fargesyn”. Den kan skille mellom lyse og mørke farger og kan programmeres til å f.eks. følge en svart stripe på gulvet, ta med seg kun den røde ballen og kjøre kun når det er lys.

14
Ultrasonisk sensor Gir roboten øyne og muligheten til å “se”
objekter på avstand. Den kan brukes til f.eks. å unngå objekter, navigere seg ned en bane med vegger eller oppdage om et objekt beveger seg.

15
Lydsensor Lydsensor Gir roboten din ører. Den måler lyd i antall
desibel og kan brukes til å få roboten til å utføre oppgaver på lydsignal. Lar roboten føle omgivelsene rundt seg og kan også brukes som startknapp for programmene dine.

16
Mindstorms NXT programmet
LEGO® MINDSTORMS® NXT programmet lar deg programmere NXT roboten og laste programmet over til NXT hjernen via USB. I programmet er det byggeinstruksjoner og programmerings veiledninger.

17
En hypotese betyr en påstand.
F.eks. Roboten svinger dersom bare ett hjul beveger seg.

Liknende presentasjoner









 Normalvisning Hvilestilling Normalvisning: •Telefonnummer til den som er logget på vises •Valget Fører til Tjenester/Menyvalg.>")


 Akam.no Akam.no (2) Akam.no (2) Online Online.>")







