Laste ned presentasjonen
Presentasjon lastes. Vennligst vent

1
Robotikk HiO – 11

9
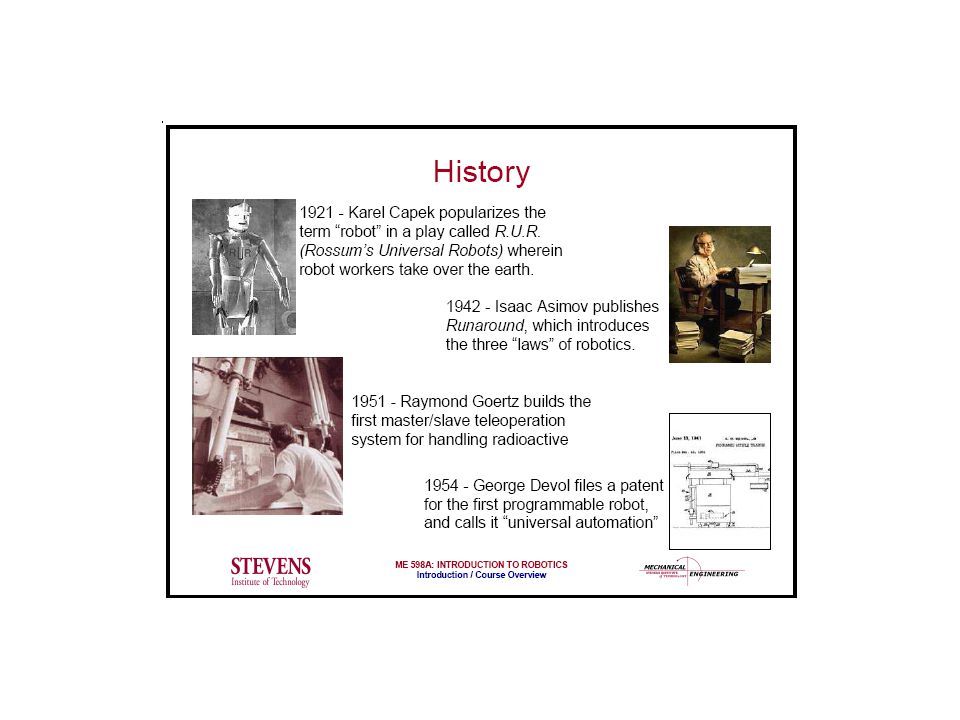
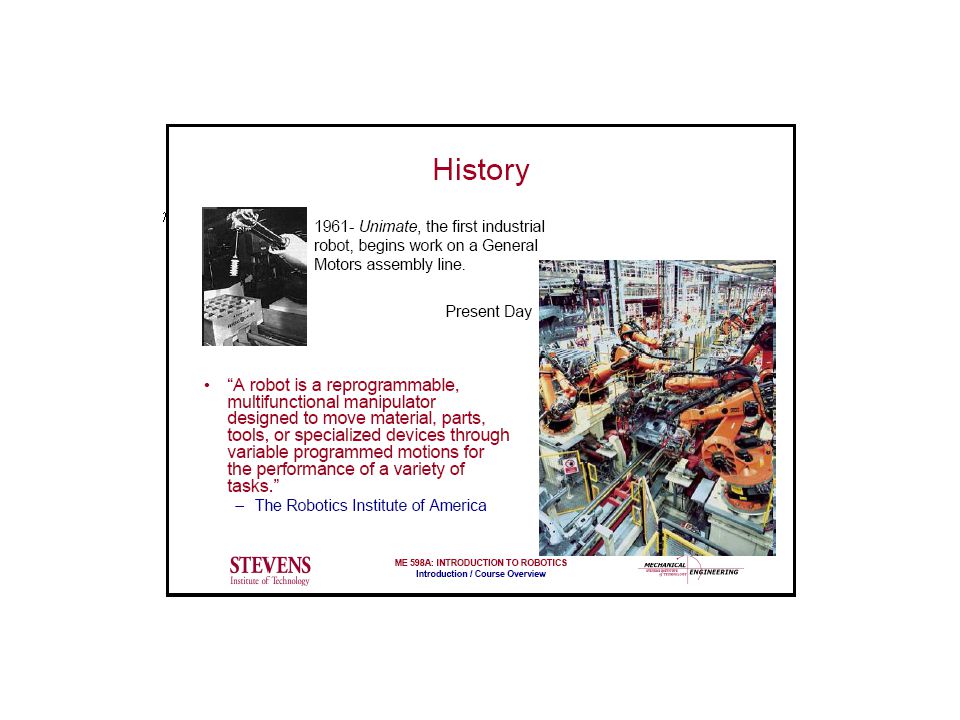
Kursforslag Høst 2009 -Begrunnelse for å automatisere, Historie -Robottyper og kinematikk -Forover og bakoverkinematikk -Singulariteter og Jacobien -Robotstudio – Teach pedant + Medfølende manualer -Kontrollsystem -Reguleringsteknikk - dynamikk -Kommunikasjon – bussystemer -Sikkerhet -Verktøy og transportbånd -Fabrikkoppbygging -Celler og linjer -Prosjekt -5 Laboppgaver -Foreleser: Georg Milvang

10
Lærebøker

11
Div http://www.iu.hio.no/~georgm http://www.smpp.northwestern.edu/savedLiter ature/Spong_Textbook.pdf http://www-user.tu- chemnitz.de/~lynn/englisch/Modul%2010%20 komplett_englisch.pdf

Liknende presentasjoner













russiske læresteder Erfaringer fra Universitetet i Tromsø Astrid Brokke – Avdeling for utdanning.>")

















